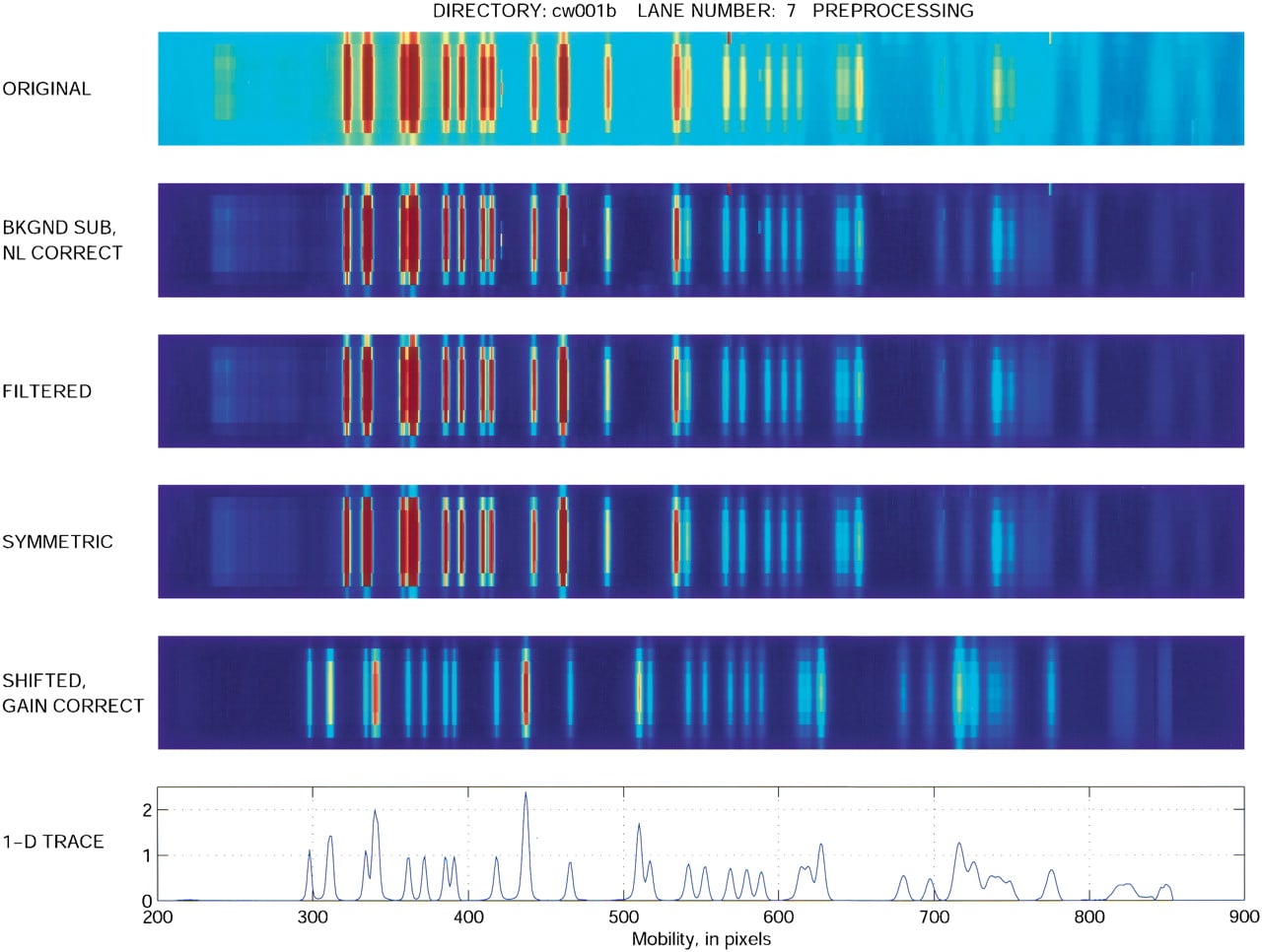
Figure 3.
Data lane preprocessing steps. Panel 1: Raw image data (after lane tracking) using MATLAB “jet” colormap. Panel 2:Result of background subtraction and correction for pointwise nonlinearity. Panel 3: Result of impulsive noise filtering.Panel 4: Result of enforced symmetry and monotonicity constraints. Panel 5: Result of gain correction and mobility shift to standard location. Panel 6: Extracted one-dimensional trace.